Folgas mecânicas – Pé manco
Conhecidas como popularmente como “pé manco”, podem ser detectadas através da análise de vibração, mas quais são os tipos de folgas e quais os espectros de vibração gerados de acordo com o tipo de folga? Existe algum tipo não citado na literatura tradicional?
“Folgas mecânicas são indicadas através dos espectros do tipo A, B ou C.
O tipo A é causado por enfraquecimento estrutural do pé da máquina, chapa de apoio ou fundação, também por cimento deteriorado ou por folga nos parafusos do calço; e distorções do quadro ou base (Ex: Pés frouxos). A análise da falha pode revelar.
O tipo B é geralmente causado por folgas nos parafusos dos mancais, quebra nos quadros da estrutura ou no pedestal do rolamento.
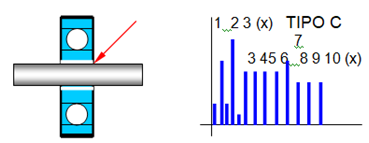
O tipo C ocorre normalmente por encaixes errados entre as partes dos componentes, o que causará muitos harmônicos devido à resposta linear das partes frouxas, para as forças dinâmicas do rotor, provocando uma forma de onda truncada.
O tipo C é causado geralmente por folgas entre revestimento interno do rolamento e sua tampa, espaço morto na luva de encaixe ou nos elementos girantes do rolamento ou por folga no eixo do rotor.” Ref.: Autor: Charlotte

Desnivelamento provocado por “Pé-Manco”
“Problema comum em motores, principalmente quando o número de apoios é maior que 4. Nestas condições, a probabilidade de todos os apoios tocarem a base simultaneamente não é tão grande.
Pés – mancos podem acarretar distorções na carcaça, as quais alteram os valores de “gap” ao longo do estator – rotor (vibrações elétricas). Podem também provocar desalinhamento no conjunto (vibrações mecânicas)
A maneira correta de se verificar este distúrbio é:
Posicionar e zerar o relógio comparador próximo a cada parafuso de fixação.
Com o auxilio de um torquímetro, soltar bem lentamente o parafuso e verificar o quanto variou a leitura no mostrador do relógio. Se a variação for de 0,02 a 0,03 mm a situação é considerada normal.
Acima destes valores pode-se considerar “pé – manco”. Neste caso medir com apalpador de lâminas entre apoio do motor e base, adicionando os calços correspondentes, mais 0,02 mm para o aperto. “Repetir esta operação para os demais parafusos de fixação.”
Ref. Fonte: Apostila da FUGEMSS – 1993 (Pág. 89) Autor: Eng.º Márcio Antônio Torres Bueno
TIPO D – Citado pelo eng.º Bueno
“Um caso especial de frouxidão não giratória é a tal chamada “Pé – manco” onde a base da máquina tenha sido distorcida no momento de apertar os parafusos que o mantém no lugar usando calços inadequados.
Nesse caso o único método de diagnóstico confiável possível é retificar o problema na hora. Isso é feito afrouxando-se cada parafuso por vez até que pelo menos seja encontrado um que significativamente reduza a vibração da frouxidão.
Os calços poderiam então ser inseridos de tal forma que o parafuso possa ser re-apertado sem aumentar de volta a vibração a níveis inaceitáveis. Esse é um caso onde a retificação deve ser feita “out on the rum.” (no local)
Ref. Fonte: Apostila da Monitek do Brasil – 2001 (Pág. 83) Autor: John Mac’crae
Tradução: Engº Pimentel / Lauro Chevrand
Irregularidades não citadas nas referidas fontes:
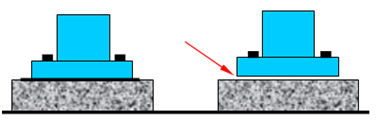
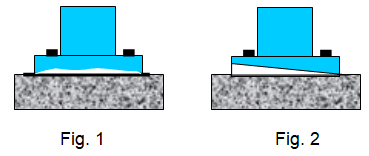
Irregularidade do pé do motor:
Pode haver uma descontinuidade do pé do motor ou mesmo da base onde o pé apóia. (veja fig. 1 e 2).
A adição de calços neste caso somente atenuará a condição existente, pois o calço não preencherá totalmente a área solicitada. A inclusão de calços nestes casos deixará o motor desalinhado. Antenor Vicente – Tec. Mecânico
Defeitos nos pés dos motores
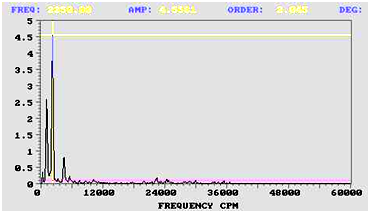
Gráfico indicando folga tipo B